Tak už ta
mánie dostihla i mne. Teda nechal jsem se dotoho
takříkajíc "uvrtat ". Byl jsem
požádán kamarády o nějaké
to udělátko na APRS. Míla OK1MX to hned pojal ze
široka, jako že použití v IZS,
například sledování hladiny při
povodních, zasílání
telemetrických dat a podobné věci. Ale k tomu je
ještě VELMI dlouhá cesta. Popravdě mi
slovní spojení TELEMETRIE a APRS již lezou krkem.
:-)
Takže jakpak se to vlastně zrodilo? Nejjednodušší cesta k aktivitě na APRS je tracker, který posílá informace z GPS, nebo nějaká meteo stanice. Kdysi dávno, když bylo APRS "novinkou", celé úskalí bylo v cenách GPS příjmačů. Dnes je situace naprosto odlišná a GPS příjmač lze koupit za par stovek. Jal jsem se tedy hledat inspiraci ohledně trackerů na APRS. Jirka OK1JM přišel s myšlenkou udělat to s co nejmenším příkonem a poskytl i tip na levnou a "nežravou" GPS. Respektive modul GPS ve formě "součástky". Nicméně stále zbývalo vyřešit, jakou konstrukci vybrat. Tedy čí hotový projekt zrealizovat. Jak jsem hledal, tak jsem našel spousty zapojení s procesory PIC. Jenže můj vztah k PIČ procesorům je asi takový, jako k M$ Widlím. Takže po delším hledání jsem zjistil, že jediný APRS tracker s nePIC procesorem je WHEREAVR, který rozšířil DH3WR. Německá konstrukce má jistá vylepšení a celý projekt je i stále živý. Je proto pochopitelné, že jsem jej vybral. Dopředu upozorňuji, že z velké většiny hodlám přepsat hlavní řídící program pro CPU, protože některé věci mi absolutně nesedí, některé jsem nepochopil a některé nerozchodil. Takže to přepíši dle svých představ.
První úpravy se týkaly změny velikosti příjmového buferu, dále pak při testovaní byla změněna minimální rychlost a další úpravy budou následovat: Power Save, "lidštější konfigurace", čtení teploty z DS1820, posílání různých telemetrických dat, atp...
V současné verzi tracker umí poslat polohu a veškeré náležitosti; pošle velikost napájecího napětí a pokud by někdo sehnal TMP725 (I2C teploměr), tak i teplotu. Tracker posílá údaje každých 30 vteřin, ale pouze pokud je GPS fixovaná (synchronizovaná) a při minimální rychlosti 2 km/h. Pokud je rychlost nižší, tracker odešle 5 packetů a umlkne. Další packet pošle až se rychlost zvýší na 2 nebo více km/h.
Testovací prototyp jsem nedělal s ohledem na velikost, ale následující kousek už bude co nejmenší. Prototyp "chlastá" 80 mA včetně aktivní antény. Bez ní je to "jen" 51 mA, což na bateriový provoz je moc. Takže již pracuji na úspoře energie. Mým cílem je komplexní zařízení, tedy APRS část i TRX část, která by malým výkonem (do 1W) dokázalo posílat údaje na jednu Li-Ion baterii z mobilního telefonu alespoň 24 hodin. K tomu je ale také daleká cesta....
Pro úplnost dodám, že GPS moduly lze velmi levně koupit u Sectronu a celý prototyp (včetně GPS !!!) vyšel asi na 800,- Pozor, nebuďte tak hloupí jak já a kupte si rovnou modul s intergrovanou anténou. Stojí sice 2x tolik, ale ušetříte spoustu místa a navíc externí anténa se dá sehnat na aukru nejlevněji za 200+poštovné, takže toho člověk stejně moc neušetří.... Proto dobře zvážit, za jakým účelem to člověk vlastně staví. Zda do auta, nebo do kapsy.
Takže jakpak se to vlastně zrodilo? Nejjednodušší cesta k aktivitě na APRS je tracker, který posílá informace z GPS, nebo nějaká meteo stanice. Kdysi dávno, když bylo APRS "novinkou", celé úskalí bylo v cenách GPS příjmačů. Dnes je situace naprosto odlišná a GPS příjmač lze koupit za par stovek. Jal jsem se tedy hledat inspiraci ohledně trackerů na APRS. Jirka OK1JM přišel s myšlenkou udělat to s co nejmenším příkonem a poskytl i tip na levnou a "nežravou" GPS. Respektive modul GPS ve formě "součástky". Nicméně stále zbývalo vyřešit, jakou konstrukci vybrat. Tedy čí hotový projekt zrealizovat. Jak jsem hledal, tak jsem našel spousty zapojení s procesory PIC. Jenže můj vztah k PIČ procesorům je asi takový, jako k M$ Widlím. Takže po delším hledání jsem zjistil, že jediný APRS tracker s nePIC procesorem je WHEREAVR, který rozšířil DH3WR. Německá konstrukce má jistá vylepšení a celý projekt je i stále živý. Je proto pochopitelné, že jsem jej vybral. Dopředu upozorňuji, že z velké většiny hodlám přepsat hlavní řídící program pro CPU, protože některé věci mi absolutně nesedí, některé jsem nepochopil a některé nerozchodil. Takže to přepíši dle svých představ.
První úpravy se týkaly změny velikosti příjmového buferu, dále pak při testovaní byla změněna minimální rychlost a další úpravy budou následovat: Power Save, "lidštější konfigurace", čtení teploty z DS1820, posílání různých telemetrických dat, atp...
V současné verzi tracker umí poslat polohu a veškeré náležitosti; pošle velikost napájecího napětí a pokud by někdo sehnal TMP725 (I2C teploměr), tak i teplotu. Tracker posílá údaje každých 30 vteřin, ale pouze pokud je GPS fixovaná (synchronizovaná) a při minimální rychlosti 2 km/h. Pokud je rychlost nižší, tracker odešle 5 packetů a umlkne. Další packet pošle až se rychlost zvýší na 2 nebo více km/h.
Testovací prototyp jsem nedělal s ohledem na velikost, ale následující kousek už bude co nejmenší. Prototyp "chlastá" 80 mA včetně aktivní antény. Bez ní je to "jen" 51 mA, což na bateriový provoz je moc. Takže již pracuji na úspoře energie. Mým cílem je komplexní zařízení, tedy APRS část i TRX část, která by malým výkonem (do 1W) dokázalo posílat údaje na jednu Li-Ion baterii z mobilního telefonu alespoň 24 hodin. K tomu je ale také daleká cesta....
Pro úplnost dodám, že GPS moduly lze velmi levně koupit u Sectronu a celý prototyp (včetně GPS !!!) vyšel asi na 800,- Pozor, nebuďte tak hloupí jak já a kupte si rovnou modul s intergrovanou anténou. Stojí sice 2x tolik, ale ušetříte spoustu místa a navíc externí anténa se dá sehnat na aukru nejlevněji za 200+poštovné, takže toho člověk stejně moc neušetří.... Proto dobře zvážit, za jakým účelem to člověk vlastně staví. Zda do auta, nebo do kapsy.
23.7.2009 Odzkoušená nová verze trackeru - MiniTracker
9.10.2009 Fotografie MiniTrackeru na stanici - Foto
Schéma prototypu dle DH3WR
Deska prototypu

První testy doma za oknem

Zakrabičkování prototypu

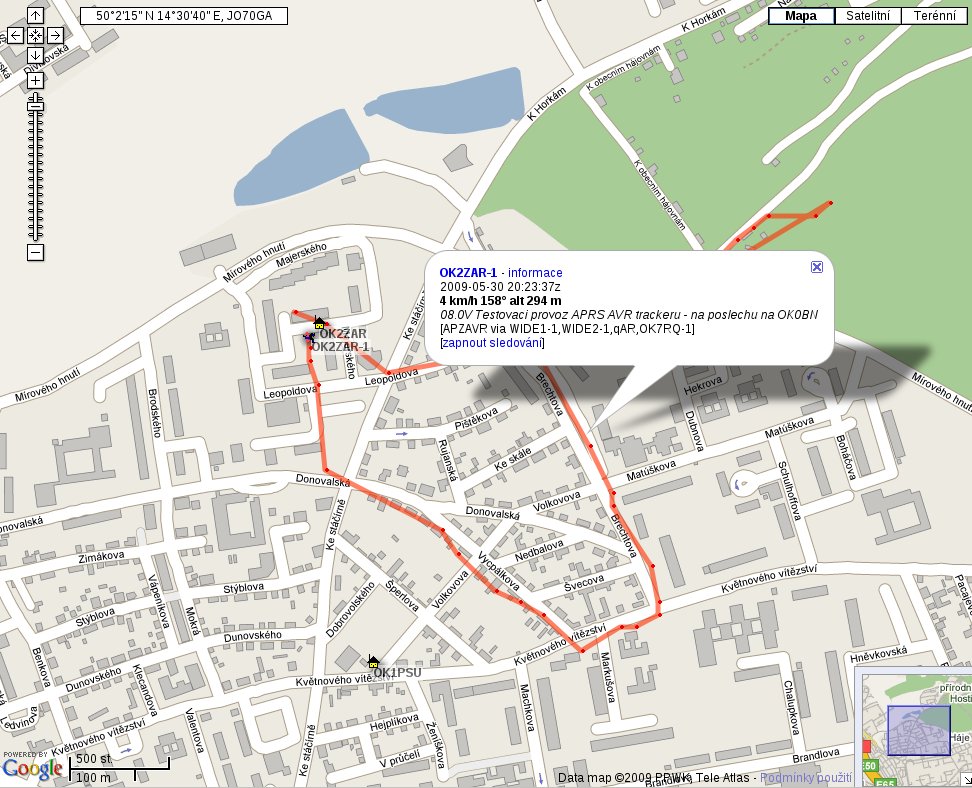
Záznam první testovací trasy do lesoparku a zpět
Jedná
se v podstatě
jen o zmenšení původní konstrukce a
drobné změny v zapojení. Ty
spočívají v přehození LED diod na
jiné nožky procesoru, ale především v
přidání P-FET tranzistoru pro
ovládání
napájení GPS a tím ušetřit
cenou
energie. Celková velikost trackeru včetně GPS
příjímače je 40x40x15 mm.
Vzhledem k úpravě v zapojení je třeba do
procesoru nahrát nový program,
nikoli ten původní od Ralfa. Odkaz dám v
nejbližší době, až jej ještě
drobně odladím. Bohužel jsem se nevyhnul asi 9ti
propojkám, jak je
vidět na fotce spoje. Obrázky mají mizernou
kvalitu - bylo to foceno ve
spěchu telefonem.
29.7.2009 - Vyřešen problém cyklického restartovaní CPU při zapnutí / vypnutí GPS. Bude to záležet kus od kusu na daném GPS modulu, ale ta moje nenažraná ludra má nějaký hodně velký odběr při zapnutí (cca asi po dobu 2ms) a stabilizátor to neustojí. Kondenzátor hodnoty 4G (kanónem na vrabce) taky výkyv nepokryl a musel jsem tedy dát do aplikace ještě jeden stabilizátor, který napájí jen CPU (hodila se jedna drátová propojka vedouci napájení k CPU - vyndal jsem ji a místo ní tam dal LE50 v TO92 pouzdru). Tím byl problém vyřešen a mohl jsem začít laborovat s PowerSave. Tato funkce je pro tracker naprosto klíčová, neboť GPS modul je hodně nenasytný a ten můj obvzlášť (200 mA !!!). Takový odběr nejen huntuje baterku, ale způsobuje i velké zahřívání stabilizátoru a teplo se přenáší na celý komplet. Zatím je PowerSave na začátku testování, ale první pokusy dávají slibné naděje.
Aktuální FirmWare pracuje takto. Po zapnutí odvysílá statustext a (pokud to je nastavene v EEPROM) čeká na FIX GPS. Odvysílá pozici s nastaveným textem (jako komentar), vypne napájení GPS a LEDka signalizující GPS FIX zacne blikat (ke konci 30s periody blikaní zrychlí), asi ve 25 vteřině spánku se zapne napájení GPS a čeká se opět na FIX (v průměru je zaFIXováno do 5 sekund). Pak se po zaFIXování čeká cca 3 sekundy, aby proběhly alespoň dvě měření GPS, protože na základě toho se zjišťuje rychlost a směr. Pak se odvysílá paket a celý proces se opakuje ve smyčce. Minimální rychlost je 2 km/h.
LEDky mají příkon 2,3 mA, CPU baští necelých 20 mA (časem to taky zkusím zmenšit), GPS potřebuje 200 mA. Z toho se vyplývá, že stímto FW je průměrná spotřeba v čase 30mA. Stabilizátory jsou Low-Drop, takže při napájecím napětí 5,2 V je na výstupu 5,0 V. Pochopitelně když tam někdo bude chtít dát 7805, tak může, nožičkově je to stejné, ale aby na výstupu bylo 5V musí být na vstupu 8V, což pro napájení z baterek není ono. Většina ručních stanic má 6ti článkový akumulátor - 7,2 V.
FirmWare 29.7.2009 - Stáhnout
Obsah EEPROM (je třeba změnit značku - je tam moje ;-) ) - Stáhnout
Zdrojové kódy sem dávat nebudu, ale v případě zájmu je pošlu. Ctím OpenSource.
Vlastní blbostí došlo ke smazání celé práce, tedy úprav v původních zdrojácích od DH3WR. Takže již nemohu zdrojáky poslat.
29.7.2009 - Vyřešen problém cyklického restartovaní CPU při zapnutí / vypnutí GPS. Bude to záležet kus od kusu na daném GPS modulu, ale ta moje nenažraná ludra má nějaký hodně velký odběr při zapnutí (cca asi po dobu 2ms) a stabilizátor to neustojí. Kondenzátor hodnoty 4G (kanónem na vrabce) taky výkyv nepokryl a musel jsem tedy dát do aplikace ještě jeden stabilizátor, který napájí jen CPU (hodila se jedna drátová propojka vedouci napájení k CPU - vyndal jsem ji a místo ní tam dal LE50 v TO92 pouzdru). Tím byl problém vyřešen a mohl jsem začít laborovat s PowerSave. Tato funkce je pro tracker naprosto klíčová, neboť GPS modul je hodně nenasytný a ten můj obvzlášť (200 mA !!!). Takový odběr nejen huntuje baterku, ale způsobuje i velké zahřívání stabilizátoru a teplo se přenáší na celý komplet. Zatím je PowerSave na začátku testování, ale první pokusy dávají slibné naděje.
Aktuální FirmWare pracuje takto. Po zapnutí odvysílá statustext a (pokud to je nastavene v EEPROM) čeká na FIX GPS. Odvysílá pozici s nastaveným textem (jako komentar), vypne napájení GPS a LEDka signalizující GPS FIX zacne blikat (ke konci 30s periody blikaní zrychlí), asi ve 25 vteřině spánku se zapne napájení GPS a čeká se opět na FIX (v průměru je zaFIXováno do 5 sekund). Pak se po zaFIXování čeká cca 3 sekundy, aby proběhly alespoň dvě měření GPS, protože na základě toho se zjišťuje rychlost a směr. Pak se odvysílá paket a celý proces se opakuje ve smyčce. Minimální rychlost je 2 km/h.
LEDky mají příkon 2,3 mA, CPU baští necelých 20 mA (časem to taky zkusím zmenšit), GPS potřebuje 200 mA. Z toho se vyplývá, že stímto FW je průměrná spotřeba v čase 30mA. Stabilizátory jsou Low-Drop, takže při napájecím napětí 5,2 V je na výstupu 5,0 V. Pochopitelně když tam někdo bude chtít dát 7805, tak může, nožičkově je to stejné, ale aby na výstupu bylo 5V musí být na vstupu 8V, což pro napájení z baterek není ono. Většina ručních stanic má 6ti článkový akumulátor - 7,2 V.
FirmWare 29.7.2009 - Stáhnout
Obsah EEPROM (je třeba změnit značku - je tam moje ;-) ) - Stáhnout
Zdrojové kódy sem dávat nebudu, ale v případě zájmu je pošlu. Ctím OpenSource.
Vlastní blbostí došlo ke smazání celé práce, tedy úprav v původních zdrojácích od DH3WR. Takže již nemohu zdrojáky poslat.
MiniTracker -
Dokonáno jest
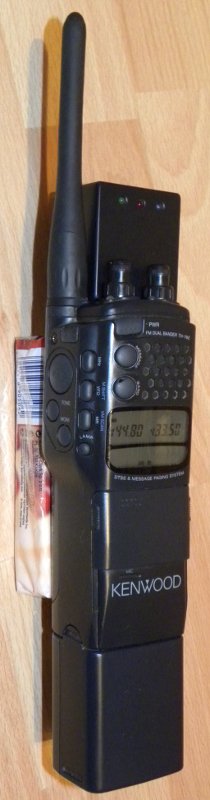




První použití
trackeru na stanici Kenwood TH-78E. Ve stanici jsem udělal drobnou
úpravu, aby mohl být tracker napájen ze stanice. Druhá drobnost
spočívala v tom, aby se tracker zapínal společně se zapínáním stanice.
Kdyby to někoho náhodou inspirovalo k podobné montáži, tak důsledně
varuji, že je mnohem pohodlnější a jednodušší použít stanici s
mechanickým vypínačem, než s vypínačem elektronickým. A s takto
nasazenou pendrekovou anténou počitejte s velkým ovlivnováním trackeru
VF polem. Ja jsem na testy použil 1/4 "pendrek", kde vyzařování u
"paty"
antény bylo minimální a tracker fungoval.